Implementation of the Reduced Order Model Computation
PyCOMPSs is a task-based programming model which allows developers to define parallel workflows as simple sequential python scripts. To implement a PyCOMPSs application, developers have to identify what parts of an application are the candidates to be a task. They are usually Python methods with a certain computation granularity (larger than hundreds of milliseconds) that can potentially run concurrently with other parts of the application. Those methods have to be annotated with the @task decorator and indicate the directionality of the parameters. Based on the task definitions, the runtime is able to detect dependencies between task invocations and infer the inherent parallelism of a Python script.
PyCOMPSs has been extended in eFlows4HPC, with two new decorators (@software and @dt) to facilitate the integration of different kinds of computations in a PyCOMPSs workflow and facilitating their reuse in other workflows. This section will show how this methodology is applied in the case of the Reduced Order Model (ROM) workflow. More details about how to use these decorators in other cases are available at the Programming Interfaces section.
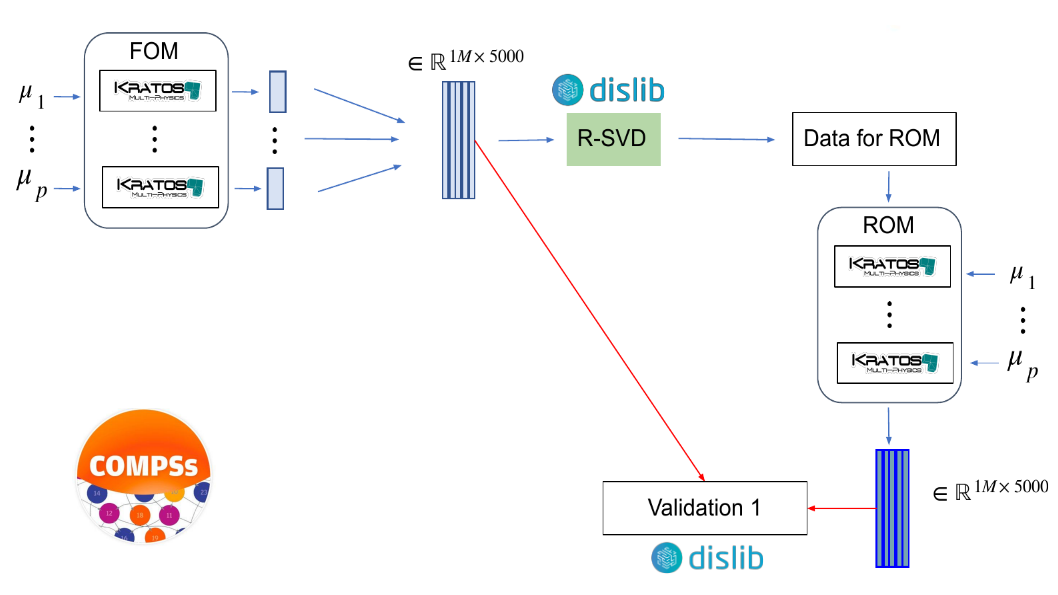
Figure 20 Reduced Order Model Computation Overview.
Figure 20 shows an overview of the first version of the Reduced Order Model workflow implemented in Pillar I. The workflow starts with a set of Full Order Model simulations of the system in which we want to create the ROM. These simulations are executed using the Python API of the Kratos Multiphysics software, and the results of these simulations are used as a training dataset for the ROM computation. To calculate the ROM, we have implemented the Randomized SVD algorithm using the dislib which implements distributed ML algorithms on top of PyCOMPSs. The workflow finishes with another set of Kratos computations which repeats the simulations using the obtained ROM and the results are compared with the FOM results.
Code 10 shows a code snippet about how the workflow has been implemented with PyCOMPSs. You can observe the main code of the workflow is a simple Python script where after parsing the arguments and loading the model and parameters, the different FOM simulations (execute_FOM_instance) are invoked with different configuration values. The results of these simulations (sim_results variable) are passed to the randomized SVD computation (rSVD) which produces the ROM (rom variable). This ROM is used as input for the ROM simulations (execute_ROM_instance) and their results are compared by invoking the compare_ROM_vs_FOM functions.
if __name__ == '__main__':
model_file, sim_cfgs, desired_rank, output_rom_file = parse_arguments()
model, parameters = load_model_parameters(model_file)
# Full Order Model (FOM) simulation for each simulation parameter.
sim_results=[]
for cfg in sim_cfgs:
sim_results.append(execute_FOM_instance(model,parameters,[cfg]))
# Computes the "fixed rank" randomized SVD in parallel using the dislib library
rom = rSVD(sim_results, desired_rank)
# Reduced Order Model simulations for the same simulation parameters used for the FOM
rom_results=[]
for cfg in sim_cfgs:
sim_results.append(execute_ROM_instance(model,parameters,[cfg],rom))
compare_ROM_vs_FOM(rom_results, sim_results)
Code 11 and Code 12 shows a code snippet about how the FOM simulation has been implemented with PyCOMPSs. On top of the function which includes the Kratos Multiphysics calls we have included @software decorator to indicate the function is a Kratos FOM invocation described by the fom.json file stored in the Software Catalog. This description indicates that it will be executed as a task, consuming the number of cores indicated by $KRATOS_CUS environment variable.
@software(config_file = SW_CATALOG+"/kratos/fom.json")
def execute_FOM_instance(model,parameters, sample):
import KratosMultiphysics
from kratos_simulations import GetTrainingData
current_model = KratosMultiphysics.Model()
model.Load("ModelSerialization",current_model)
del(model)
current_parameters = KratosMultiphysics.Parameters()
parameters.Load("ParametersSerialization",current_parameters)
del(parameters)
# get sample
simulation = GetTrainingData(current_model,current_parameters,sample)
simulation.Run()
return simulation.GetSnapshotsMatrix()
{
"execution" : {
"type":"task"
},
"constraints" : {
"computing_units": "$KRATOS_CUS"
},
"parameters" : {
"model" : "IN",
"parameters" : "IN",
"sample" : "IN",
"returns" :1
}
}
In the case of the randomized SVD, the code snippet and configuration file can be found in Code 13 and Code 14. On top of the function which includes the dislib calls, we have included the @dt and @software decorators. On one side, the @software decorator indicates the function is a dislib code whose execution is described in the dislib.json file stored in the Software Catalog. This description indicates that it will be treated as a PyCOMPS workflow. On the other side, the @dt decorator indicates the transformation required to the blocks to the ds-array used by dislib as implemented in the load_blocks_rechunk function.
@dt("blocks", load_blocks_rechunk, shape=expected_shape, block_size=simulation_block_size,
new_block_size=desired_block_size, is_workflow=True)
@software(config_file = SW_CATALOG + "/py-dislib/dislib.json")
def rSVD(blocks, desired_rank=30):
from dislib_randomized_svd import rsvd
u,s = rsvd(blocks, desired_rank, A_row_chunk_size, A_column_chunk_size)
return u
{
"execution" : {
"type" : "workflow"
}
}
Following the same procedure as above, we have defined the ROM simulations as depicted in Code 15 and the ROM/FOM comparison as depicted in Code 16. The ROM simulations have a lot of similarities to the FOM simulations. In this case, a data transformation has been added to serialize the rom object to the ROM file required by Kratos Multiphysics. In the case of the ROM/FOM comparison, as it is implemented as a dislib algorithm, two load_blocks_rechunk data transformations have been included to convert the ROM and FOM results to dislib’s ds-arrays.
@dt(target="rom", function=ROM_file_generation, type=OBJECT_TO_FILE, destination=rom_file)
@software(config_file = SW_CATALOG + "/kratos/rom.json")
def execute_ROM_instance(model,parameters,sample,rom):
import KratosMultiphysics
from kratos_simulations import RunROM_SavingData
load_ROM(rom)
current_model = KratosMultiphysics.Model()
model.Load("ModelSerialization",current_model)
current_parameters = KratosMultiphysics.Parameters()
parameters.Load("ParametersSerialization",current_parameters)
# get sample
simulation = RunROM_SavingData(current_model,current_parameters,sample)
simulation.Run()
return simulation.GetSnapshotsMatrix()
@dt("SnapshotsMatrixROM", load_blocks_rechunk, shape=expected_shape, block_size=simulation_block_size,
new_block_size=desired_block_size, is_workflow=True)
@dt("SnapshotsMatrixFOM", load_blocks_rechunk, shape=expected_shape, block_size=simulation_block_size,
new_block_size=desired_block_size, is_workflow=True)
@software(config_file = SW_CATALOG + "/py-dislib/dislib.json")
def compare_ROM_vs_FOM(SnapshotsMatrixROM, SnapshotsMatrixFOM):
import dislib as ds
import numpy as np
#using the Frobenious norm of the snapshots of the solution
original_norm= np.linalg.norm((SnapshotsMatrixFOM.norm().collect()))
intermediate = ds.data.matsubtract(SnapshotsMatrixROM, SnapshotsMatrixFOM) #(available on latest release)
intermediate = np.linalg.norm((intermediate.norm().collect()))
final = intermediate/original_norm
np.save('relative_error_rom.npy', final)
All this code has been stored in the Workflow Reposirory as indicated in this section.